
Conform statisticilor noii strategii a Institutului de conducere fără echipaj, peste 200 de evenimente de finanțare importante au fost dezvăluite în industria de conducere autonomă în țară și în străinătate în 2021, cu o sumă totală de finanțare de aproape 150 de miliarde de yuani (inclusiv IPO). În interior, aproape 70 de evenimente de finanțare și peste 30 de miliarde de yuani au fost strânse de furnizorii de produse și soluții fără echipaj de viteză redusă.
În ultimii doi ani, au apărut scenarii de livrare fără echipaj, curățare fără pilot și aterizare cu depozitare fără echipaj, iar intrarea puternică a capitalului a împins vehiculele fără pilot pe „banda rapidă” a dezvoltării. Odată cu dezvoltarea tehnologiei de fuziune a senzorilor multimodali, reprezentanții de pionierat au intrat în echipa „profesională”, efectuând diverse sarcini, cum ar fi curățarea drumurilor, detașarea și expres, livrarea de expediere etc.

Vehicule de curățenie fără pilot în lucru
Ca „viitor vehicul profesional” care înlocuiește forța de muncă, soluțiile de evitare a obstacolelor aplicate nu trebuie să fie neglijente pentru a câștiga în industria emergentă, iar vehiculul trebuie să fie împuternicit în funcție de scenariul de lucru, cum ar fi vehiculul fără pilot în industria salubrității. ar trebui să aibă funcția de identificare a stocurilor; cu funcția de evitare a obstacolelor în siguranță în industria livrărilor; cu funcția de evitare a riscurilor de urgență în industria de depozitare……
- Industria de salubritate: o treime de senzori inteligente scheme

Industria de salubritate – Schema de detectare inteligentă Trinity prezentată
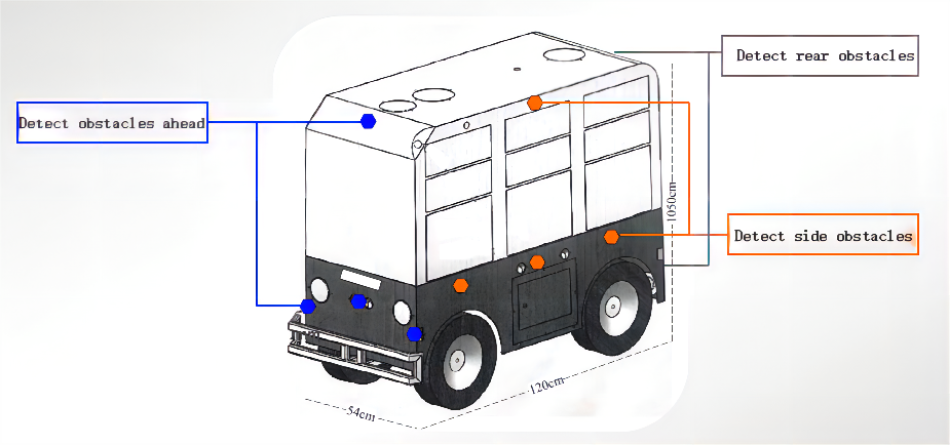
Robotul „mai curat” Candela Sunshine de la Olimpiada de iarnă de la Beijing, folosește o schemă de detectare inteligentă, echipată cu 19 radare cu ultrasunete, permițând robotului să aibă funcții de evitare a obstacolelor, prevenirea debordării și anti-dumping.
Arotundevitarea obstacolelor
Spatele este echipat cu 2 radare cu ultrasunete pentru monitorizarea inversării și avertizarea obstacolelor, 3 radare cu ultrasunete sub față și 6 radare cu ultrasunete pe laterale pentru funcții de avansare și evitare a obstacolelor orizontale, verticale și oblice.
Prevenirea preaplinului
Instalați un senzor în partea de sus a zonei de încărcare a vehiculului pentru a realiza funcția de monitorizare a situației de încărcare și pentru a vă asigura că capacitatea de încărcare îndeplinește standardele de siguranță.
Antidumping
Împiedică răsturnarea secțiunii despicate din cauza forțelor externe în stare neîncărcată sau subîncărcată, punând în pericol siguranța publică.
- Industria de livrare:cuprinzătorevitarea inteligentă a obstacolelor scheme
Industria livrărilor – demonstrație parțială a schemei inteligente de evitare a obstacolelor
În comparație cu logistica pe distanțe lungi, nucleul scenariului industriei de livrare se află pe distanța scurtă și pe frecvența înaltă, ceea ce înseamnă că vehiculele de livrare fără pilot trebuie să fie proiectate pentru a fi mai flexibile și mai sigure pentru a face față scenariilor urbane complexe, cum ar fi transportul navetei clădirilor. și evitarea obstacolelor pe alee. DYP a oferit tehnologiei Zhixing o schemă inteligentă de evitare a obstacolelor, făcând ca produsul său să devină vehicul de livrare fără pilot pentru a fi testat într-un mediu semi-deschis din China.
Evitarea obstacolelor din față și din spate
Un radar cu ultrasunete este montat în partea de sus a față și în spate pentru detectarea obstacolelor mai înalte, cum ar fi stâlpii de restricție de înălțime; trei radare cu ultrasunete sunt montate în partea de jos a părții din față și din spate pentru a detecta obstacolele laterale joase și frontale, cum ar fi stâlpii de restricție. În același timp, radarele cu ultrasunete din partea din față și din spate sunt capabile să securizeze vehiculul fără pilot pentru mers înapoi sau viraj.
Evitarea obstacolelor laterale
Un radar cu ultrasunete este instalat deasupra fiecărei părți pentru a detecta obstacolele laterale înalte și pentru a ajuta la activarea funcției de livrare rapidă; trei radare cu ultrasunete sunt instalate sub fiecare parte pentru a detecta obstacolele laterale joase, cum ar fi marginile drumurilor, centurile verzi și stâlpii în picioare. În plus, radarele cu ultrasunete din partea stângă și dreaptă sunt capabile să găsească „spațiul de parcare” potrivit pentru vehiculul fără pilot și să finalizeze parcarea automată cu succes.
- Industria de depozitare: evitarea situațiilor de urgență și optimizarea rutelorzation scheme

Diagrama de evitare a obstacolelor AGV
Vehiculele fără pilot din depozitul comun sunt poziționate pentru planificarea traseului local prin soluții tehnologice cu infraroșu și laser, dar ambele sunt afectate de lumină în ceea ce privește precizia, iar pericolele de coliziune pot apărea atunci când mai multe cărucioare se încrucișează într-un depozit. Dianyingpu oferă soluții de evitare a riscurilor de urgență și de optimizare a rutelor pentru industria de depozitare care nu sunt afectate de lumină, folosind radar cu ultrasunete pentru a ajuta depozitul AGV să obțină evitarea autonomă a obstacolelor în depozite, parcare în timp util și precisă în perioadele de criză pentru a evita coliziunile.
Urgențăevitare
Când radarul cu ultrasunete detectează un obstacol care intră în zona de avertizare, senzorul va transmite în timp informațiile de orientare a celui mai apropiat obstacol de căruciorul fără pilot către sistemul de control AGV, iar sistemul de control va controla căruciorul să încetinească și să frâneze. Pentru acele obstacole care nu se află în zona înainte a căruciorului, chiar dacă sunt aproape, radarul nu va avertiza pentru a asigura eficiența lucrului căruciorului.
Traseu optimization
Vehiculul fără pilot folosește norul de puncte laser combinat cu harta de înaltă precizie pentru planificarea traseului local și obține un număr de traiectorii care trebuie selectate. Apoi, informațiile obstacole obținute prin ultrasunete sunt proiectate și recalculate la sistemul de coordonate al vehiculului, traiectoriile obținute care urmează să fie selectate sunt filtrate și corectate în continuare, în final este derivată traiectoria optimă, iar mișcarea înainte se bazează pe această traiectorie.

- Capacitate de raza de actiune pana la 5 m,punct orb de până la 3 cm
- Stabil, neafectat de lumină șiculoarea măsurată obiect
- Fiabilitate ridicată, faceți cunoștință cucerințele clasei vehiculului
Ora postării: 30-aug-2022